
Blink.pde: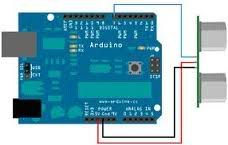
Gambar 4. Rangkaian PING dengan Arduino
PING.pde:
// Program Demo PING untuk mengukur Jarak
const int pingPin = 7;
void setup() {
// initialize serial communication:
Serial.begin(9600);
}
void loop()
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds)
{
// According to Parallax's datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
Pendahuluan tentang arduino
Arduino board ialah modul yang menggunakan mikrokontroler AVR dan menggunakan seri yang lebih canggih, sehingga dapat digunakan untuk membangun sistem elektronika berukuran minimalis namun handal dan cepat. Berbagai modul dan sensor terkini dapat dipasang pada board ini dilengkapi dengan berbagai kode demo yang memuaskan.
Arduino terdiri dari beberapa board, yang dapat digunakan sesuai kebutuhan dan menggunakan software open source yang dapat dijalankan pada Windows, Mac dan Linux. Beberapa board yang terkenal ditampilkan pada gambar di bawah :
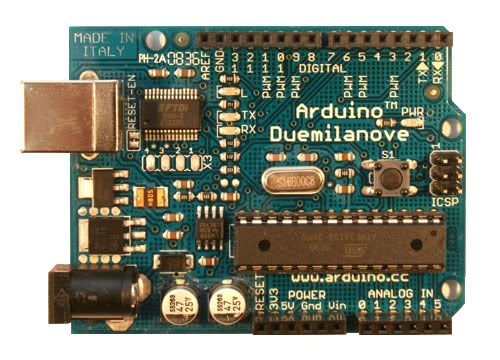
Gambar 1. Arduino Main Board berbasis ATmega328 dengan bootloader
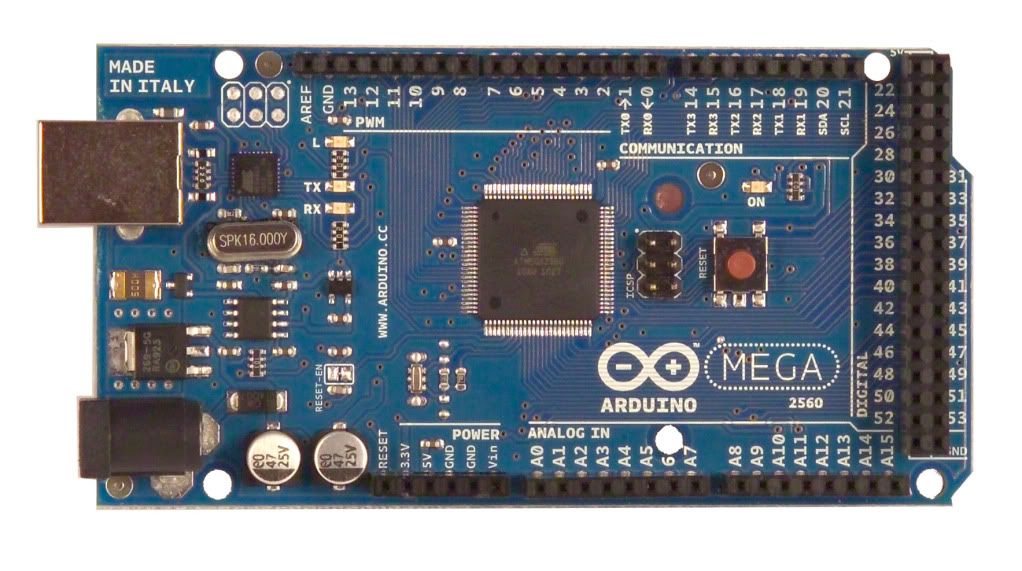
Gambar 2. Arduino Mega 2560 dengan 8 ch ADC dan fitur PWM
Fitur Arduino Mega 2560:
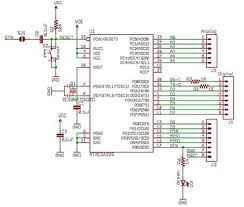
Mikrokontroler Arduino ini menggunakan Arduino programming language berbasiskan Wiring dan Arduino development environment berbasiskan Processing. Arduino menggunakan koneksi USB menggunakan chip FTDI untuk melakukan pemrograman, dan biasanya pada chip Arduino sudah dimasukkan bootloader, sehingga dapat dilakukan pemrograman langsung ke dalam chip menggunakan software Arduino. Berikut ini contoh skema pada Arduino Pro 5V/16MHz.
Gambar 3. Skema Rangkaian Arduino Pro 5V/16MHz.
Untuk mencoba Arduino board, berikut langkah-langkahnya :
/*
Language: Arduino/Wiring
Kelap kelip pada p 13 setiap ½ detik
Pin 13: + leg of an LED (- leg goes to ground)
*/
int LEDPin = 13;
void setup() {
pinMode(LEDPin, OUTPUT); // set pin 13 menjadi Output
}
void loop() {
digitalWrite(LEDPin, HIGH); // hidupkan LED pada pin 13
delay(500); // delay ½ detik
digitalWrite(LEDPin, LOW); // matikan LED
delay(500); // delay ½ detik
}
Pengukuran Jarak menggunakan PING
Sensor jarak ultrasonik PING dari Parallax merupakan sensor yang paling banyak digunakan pada berbagai proyek riset dan robotika, kelebihannya antara lain selain dapat mengukur jarak 3cm – 3m, juga hanya menggunakan 1 jalur data. Pastikan Anda tidak salah pasang rangkaian PING. Contoh rangkaian berikut merupakan aplikasi pengukuran jarak menggunakan Arduino:
Langganan:
Posting Komentar (Atom)
0 komentar:
Posting Komentar