










Dalam postingan beberapa hari yang lalu telah saya tulis pengenalan merakit komputer, tutorial kali ini adalah praktek untuk melakukan hal tersebut. Dalam tutorial ini sengaja saya jadikan beberapa seri karena kalau dijadikan satu maka postingan akan terlalu panjang. Baiklah segera saja kita mulai langkah-langkah dalam merakit komputer sesuai dengan keinginan serta kebutuhan kita sendiri.
1. Persiapan
Pada saat anda mulai memutuskan untuk merakit sendiri komputer anda, maka mulailah dengan pertanyaan-pertanyaan berikut :
•Komputer macam apa yang saya inginkan? (Media Center, Desktop, Server, dsb.)
•Berapa anggaran yang kita punya?
•Apakah anda mempunyai menginginkan sebuah komputer dengan spesifikasi khusus?
•Apakah anda cukup familiar dengan komponen komputer secara fisik?
•Apakah anda mempunyai pengetahuan tentang Operating System?
•Apakah anda mempunyai peralatan yang akan dibutuhkan?
Apabila anda telah mendapatkan jawaban dari pertanyaan-pertanyaan tersebut maka hal itu akan kita gunakan sebagai panduan untuk memilih komponen dalam merakit komputer sesuai dengan keinginan anda. Masing-masing pertanyaan di atas akan membantu anda menentukan jenis motherboard, prosesor dan jumlah memori yang akan digunakan. Kemudian juga akan membantu menentukan sistem operasi komputer anda. Microsoft Windows adalah OS yang relatif lebih umum digunakan saat ini namun untuk mendapatkannya diperlukan biaya yang cukup mahal. Jika anda mencoba OS yang gratis (seperti linux) tidak diperlukan biaya namun diperlukan kemampuan yang lebih.
Selanjutnya kita akan berpedoman kepada setiap jawaban dari pertanyaan di atas dalam merakit komputer ini.
2. Tools
Dalam merakit sebuah komputer tentu saja anda akan membutuhkan peralatan yang memadai untuk melaksanakan pekerjaan tersebut. Kebutuhan peralatan yang akan anda pakai seperti contoh dalam gambar di bawah.

3. Komponen
Selanjutnya kita akan memilih komponen yang akan kita gunakan dalam perakitan komputer kita. Urutan komponen diuraikan di bawah sesuai dengan skala prioritasnya. Dari daftar di bawah, 6 komponen pertama adalah wajib sementara sisanya adalah opsional. Di bawah akan diuraikan secara singkat fungsi setiap komponen, untuk menentukan konfigurasi dari komponen komputer anda bisa membaca posting terdahulu disini.

a) Casing Komputer
Komponen ini akan menentukan tampilan dari komputer anda serta berapa banyak komponen yang dapat dimasukkan ke dalamnya. Harus diingat bahwa motherboard juga harus kompatibel dengan casing komputer yang anda pilih. Untuk informasi lebih lengkap anda dapat membaca postingan sebelumnya dengan judul Memilih Casing.

Ada banyak pilihan casing komputer yakni warna, ukuran, jumlah drive bay dsb. Jenis casing sesuai dengan jenis motherboard yang kita pilih antara lain adalah seperti ATX, AT, Nano ITX, Mini-ITX dan Pico-ITX. Jenis-jenis tersebut mempunyai ukuran yang berbeda seperti dalam gambar berikut.

Kebanyakan Motherboard dibuat dengan format ATX karena jenis inilah yang paling banyak digunakan dan merupakan standard. Casing jenis ini berukuran cukup besar sehingga memuat cukup banyak komponen seperti contoh di bawah.

Namun bila anda tidak memerlukan ruang yang luas dalam casing anda bisa memilih casing yang lebih kecil dengan jenis motherboard mini-ITX seperti contoh di bawah.

Untuk informasi tips memilih motherboard dapat anda baca pada postingan sebelumnya atau klik disini.
b) Power Supply
•Apakah anda mempunyai pengetahuan tentang Operating System?
•Apakah anda mempunyai peralatan yang akan dibutuhkan?
Apabila anda telah mendapatkan jawaban dari pertanyaan-pertanyaan tersebut maka hal itu akan kita gunakan sebagai panduan untuk memilih komponen dalam merakit komputer sesuai dengan keinginan anda. Masing-masing pertanyaan di atas akan membantu anda menentukan jenis motherboard, prosesor dan jumlah memori yang akan digunakan. Kemudian juga akan membantu menentukan sistem operasi komputer anda. Microsoft Windows adalah OS yang relatif lebih umum digunakan saat ini namun untuk mendapatkannya diperlukan biaya yang cukup mahal. Jika anda mencoba OS yang gratis (seperti linux) tidak diperlukan biaya namun diperlukan kemampuan yang lebih.
Selanjutnya kita akan berpedoman kepada setiap jawaban dari pertanyaan di atas dalam merakit komputer ini.
2. Tools
Dalam merakit sebuah komputer tentu saja anda akan membutuhkan peralatan yang memadai untuk melaksanakan pekerjaan tersebut. Kebutuhan peralatan yang akan anda pakai seperti contoh dalam gambar di bawah.
3. Komponen
Selanjutnya kita akan memilih komponen yang akan kita gunakan dalam perakitan komputer kita. Urutan komponen diuraikan di bawah sesuai dengan skala prioritasnya. Dari daftar di bawah, 6 komponen pertama adalah wajib sementara sisanya adalah opsional. Di bawah akan diuraikan secara singkat fungsi setiap komponen, untuk menentukan konfigurasi dari komponen komputer anda bisa membaca posting terdahulu disini.
a) Casing Komputer
Komponen ini akan menentukan tampilan dari komputer anda serta berapa banyak komponen yang dapat dimasukkan ke dalamnya. Harus diingat bahwa motherboard juga harus kompatibel dengan casing komputer yang anda pilih. Untuk informasi lebih lengkap anda dapat membaca postingan sebelumnya dengan judul Memilih Casing.
Ada banyak pilihan casing komputer yakni warna, ukuran, jumlah drive bay dsb. Jenis casing sesuai dengan jenis motherboard yang kita pilih antara lain adalah seperti ATX, AT, Nano ITX, Mini-ITX dan Pico-ITX. Jenis-jenis tersebut mempunyai ukuran yang berbeda seperti dalam gambar berikut.
Kebanyakan Motherboard dibuat dengan format ATX karena jenis inilah yang paling banyak digunakan dan merupakan standard. Casing jenis ini berukuran cukup besar sehingga memuat cukup banyak komponen seperti contoh di bawah.
Namun bila anda tidak memerlukan ruang yang luas dalam casing anda bisa memilih casing yang lebih kecil dengan jenis motherboard mini-ITX seperti contoh di bawah.
Untuk informasi tips memilih motherboard dapat anda baca pada postingan sebelumnya atau klik disini.
b) Power Supply
Komponen ini bertugas untuk memberikan suplai daya ke seluruh komponen yang lain Kebanyakan komputer menggunakan power supply antara 250 hingga 300 watt. Tapi bila anda berencana menambah komponen extra dalam komputer seperti video dan sound card tambahan, beberapa hard disk atau yang lain maka anda akan memerlukan catu daya yang lebih besar dari kapasitas di atas. Kebanyakan casing komputer saat ini telah dilengkapi dengan power supply, namun kita juga bisa membelinya secara terpisah yang tentu saja harus cocok dengan type motherboard.

c) Processor
Saat merakit komputer anda perlu memutuskan terlebih dahulu jenis prosesor yang sesuai dengan keinginan anda, apakah AMD atau Intel. Setiap orang punya pendapat berbeda mengenai kelebihan dan kekurangan dari keduanya. Secara umum Intel dikenal lebih mahal dari tipe AMD. Namun itu semua kembali kepada keputusan anda sendiri dalam memilih komponen yang akan menjadi otak komputer ini.


Jika anda sudah memutuskan jenis CPU yang akan anda pakai selanjutnya adalah menentukan kecepatan dari CPU tersebut. Biasanya hal ini tergantung dari anggaran yang kita sediakan. Prosesor Atom yang saat ini banyak digunakan oleh Netbook adalah salah satu alternatif karena selain harganya murah juga berukuran kecil sehingga akan muat dalam motherboard yang kecil.
d) Motherboard
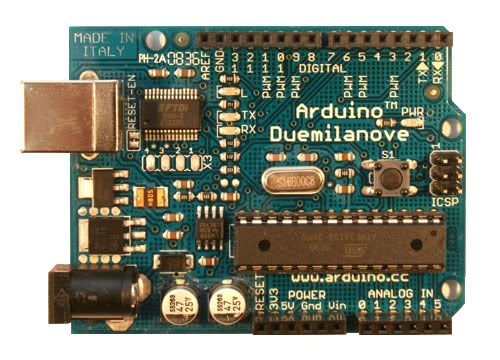
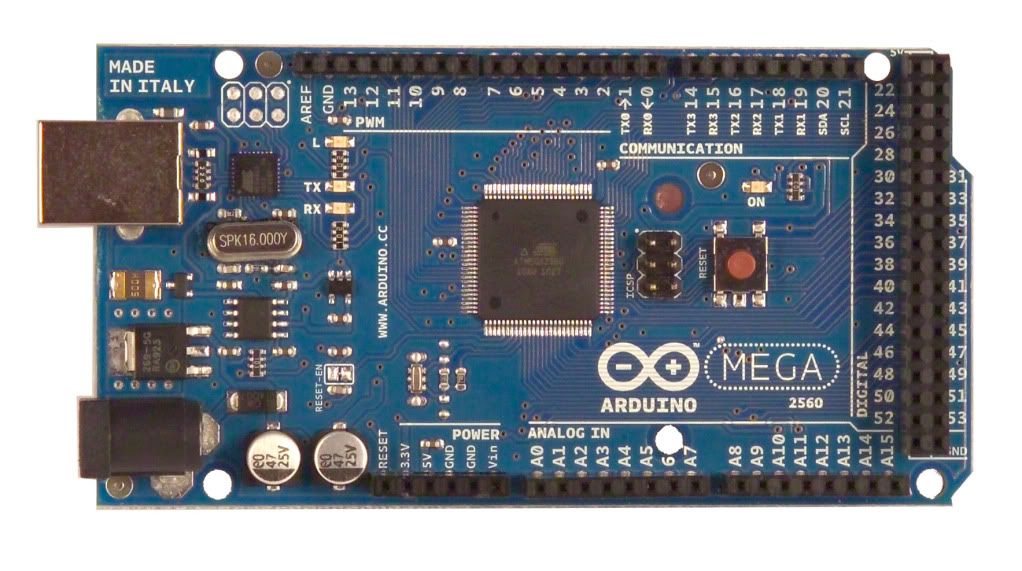
Motherboard juga sering disebut Mainboard jadi jangan menjadi bingung dengan dua istilah tersebut. Komponen inilah yang akan menghubungkan semua komponen anda. Saat anda memilih sebuah motherboard anda harus mempunyai gambaran komponen apa saja yang nantinya akan anda hubungkan. Motherboard ini akan menentukan jumlah maksimum memory yang dapat dipasang, kecepatan prosesor dan jumlah slot yang tersedia.

Contoh Motherboard ATX di atas memiliki 5 slot PCI, 2 konektor IDE dan dua slot untuk Memory (DRAM). Untuk informasi detail dalam memilih motherboard bisa anda baca disini.
Konektor IDE dalam motherboard ini digunakan untuk menghubungkan dengan Hard Disk Drive dengan jenis IDE. Selain itu ada juga tipe konektor terbaru yang menggunakan jenis SATA untuk menghubungkan dengan Hard Drive. Apabila anggaran anda terbatas maka anda bisa memilih Hard Drive jenis IDE yang harganya lebih murah dibandingkan dengan SATA. Banyak Motherboard yang sudah dilengkapi dengan Sound dan Graphic Card yang terintegrasi (on board) sehingga anda tidak perlu membeli lagi kecuali untuk tujuan khusus.
e) RAM (Memory)
Komponen RAM atau sering disebut dengan Memory adalah komponen yang digunakan oleh komputer untuk menjalankan programnya. Semakin besar RAM yang anda miliki maka akan semakin baik kinerja komputer dalam menjalankan program. Apabila memory yang tersedia telah dipergunakan dan komputer masih memerlukan memory maka komputer tersebut akan menggunakan virtual memory dari hard drive yang akan mengakibatkan komputer menjadi lambat. Jadi disarankan untuk memasang Memory dengan kapasitas minimum 1GB untuk memenuhi kebutuhan penggunaan sehari-hari.

f) Hard drive
c) Processor
Saat merakit komputer anda perlu memutuskan terlebih dahulu jenis prosesor yang sesuai dengan keinginan anda, apakah AMD atau Intel. Setiap orang punya pendapat berbeda mengenai kelebihan dan kekurangan dari keduanya. Secara umum Intel dikenal lebih mahal dari tipe AMD. Namun itu semua kembali kepada keputusan anda sendiri dalam memilih komponen yang akan menjadi otak komputer ini.
Jika anda sudah memutuskan jenis CPU yang akan anda pakai selanjutnya adalah menentukan kecepatan dari CPU tersebut. Biasanya hal ini tergantung dari anggaran yang kita sediakan. Prosesor Atom yang saat ini banyak digunakan oleh Netbook adalah salah satu alternatif karena selain harganya murah juga berukuran kecil sehingga akan muat dalam motherboard yang kecil.
d) Motherboard
Motherboard juga sering disebut Mainboard jadi jangan menjadi bingung dengan dua istilah tersebut. Komponen inilah yang akan menghubungkan semua komponen anda. Saat anda memilih sebuah motherboard anda harus mempunyai gambaran komponen apa saja yang nantinya akan anda hubungkan. Motherboard ini akan menentukan jumlah maksimum memory yang dapat dipasang, kecepatan prosesor dan jumlah slot yang tersedia.
Contoh Motherboard ATX di atas memiliki 5 slot PCI, 2 konektor IDE dan dua slot untuk Memory (DRAM). Untuk informasi detail dalam memilih motherboard bisa anda baca disini.
Konektor IDE dalam motherboard ini digunakan untuk menghubungkan dengan Hard Disk Drive dengan jenis IDE. Selain itu ada juga tipe konektor terbaru yang menggunakan jenis SATA untuk menghubungkan dengan Hard Drive. Apabila anggaran anda terbatas maka anda bisa memilih Hard Drive jenis IDE yang harganya lebih murah dibandingkan dengan SATA. Banyak Motherboard yang sudah dilengkapi dengan Sound dan Graphic Card yang terintegrasi (on board) sehingga anda tidak perlu membeli lagi kecuali untuk tujuan khusus.
e) RAM (Memory)
Komponen RAM atau sering disebut dengan Memory adalah komponen yang digunakan oleh komputer untuk menjalankan programnya. Semakin besar RAM yang anda miliki maka akan semakin baik kinerja komputer dalam menjalankan program. Apabila memory yang tersedia telah dipergunakan dan komputer masih memerlukan memory maka komputer tersebut akan menggunakan virtual memory dari hard drive yang akan mengakibatkan komputer menjadi lambat. Jadi disarankan untuk memasang Memory dengan kapasitas minimum 1GB untuk memenuhi kebutuhan penggunaan sehari-hari.
f) Hard drive
Komponen ini adalah tempat menyimpan seluruh data dan program anda. Semakin besar kapasitas yang anda miliki maka akan semakin besar pula data yang dapat anda simpan. Saat ini di pasaran tersedia hard disk dengan kapasitas hingga 250 GB. Ada dua jenis hard disk yang dibedakan menurut koneksi mereka, yakni IDE dan SATA. Sata memiliki karakteristik lebih cepat dalam memproses data dibandingkan dengan IDE.

g) CD/DVD-ROM
Komponen ini adalah drive optic. Optical drive saat in ilebih banyak digunakan daripada floppy drive. Anda bisa menggunakan drive ini untuk mendengarkan musik, menonton video atau untuk melakukan back up data.
Optical drive ini bisa berupa CD-Rom yang hanya dapat digunakan untuk membaca CD or a CD-RW yang dapat membaca serta menulis pada media CD. Jika anda bermaksud menonton film dalam format DVD tentu saja anda harus memasang DVD-ROM. Ada juga jenis combo-drive yang dapat membaca dan menulis dalam CD namun hanya dapat membaca format DVD.

h) Video/Graphics Card
Bila anda tidak terlalu memerlukan kualitas grafis yang baik dan merasa cukup dengan fitur dari motherboard maka anda bisa melewati bagian ini.

Sebuah kartu grafis yang baik akan sangat memberikan kualitas yang berbeda pada tampilan layar monitor. Komponen ini diperlukan saat anda menjalankan aplikasi video editing atau bermain game terbaru yang menuntut kualitas gambar yang baik.

i) Network/Ethernet Card
Hampir semua motherboard saat ini telah dilengkapi dengan komponen ini. Komponen ini berfungsi untuk menghubungkan komputer kita ke dalam suatu network.

j) Sound Card
Seperti halnya Graphic Card, bila anda tidak memerlukan kualitas suara yang tinggi maka akan cukup menggunakan fitur bawaan dari motherboard. Sebaliknya bila anda menginginkan kualitas suara yang baik maka pilihan Sound Card yang terpisah sangat dianjurkan.

k) Monitor
g) CD/DVD-ROM
Komponen ini adalah drive optic. Optical drive saat in ilebih banyak digunakan daripada floppy drive. Anda bisa menggunakan drive ini untuk mendengarkan musik, menonton video atau untuk melakukan back up data.
Optical drive ini bisa berupa CD-Rom yang hanya dapat digunakan untuk membaca CD or a CD-RW yang dapat membaca serta menulis pada media CD. Jika anda bermaksud menonton film dalam format DVD tentu saja anda harus memasang DVD-ROM. Ada juga jenis combo-drive yang dapat membaca dan menulis dalam CD namun hanya dapat membaca format DVD.
h) Video/Graphics Card
Bila anda tidak terlalu memerlukan kualitas grafis yang baik dan merasa cukup dengan fitur dari motherboard maka anda bisa melewati bagian ini.
Sebuah kartu grafis yang baik akan sangat memberikan kualitas yang berbeda pada tampilan layar monitor. Komponen ini diperlukan saat anda menjalankan aplikasi video editing atau bermain game terbaru yang menuntut kualitas gambar yang baik.
i) Network/Ethernet Card
Hampir semua motherboard saat ini telah dilengkapi dengan komponen ini. Komponen ini berfungsi untuk menghubungkan komputer kita ke dalam suatu network.
j) Sound Card
Seperti halnya Graphic Card, bila anda tidak memerlukan kualitas suara yang tinggi maka akan cukup menggunakan fitur bawaan dari motherboard. Sebaliknya bila anda menginginkan kualitas suara yang baik maka pilihan Sound Card yang terpisah sangat dianjurkan.
k) Monitor
Jika anda mempunyai anggaran yang lebih maka disarankan untuk memilih jenis monitor LCD karena memiliki banyak kelebihan bila dibandingkan dengan jenis Tabung (CRT) antara lain adalah : Menghemat tempat karena ukurannya yang tipis, konsumsi daya lebih rendah dan yang paling utama adalah lebih ramah untuk mata kita.

l) Keyboard and Mouse
Komponen ini berfungsi memberikan perintah kepada komputer untuk melakukan proses yang kita inginkan. Ada dua jenis keyboard yakni menggunakan kabel atau tanpa kabel (wireless). Disarankan untuk membeli Keyboard kabel Multimedia dan setidaknya mouse optik untuk kenyamanan pemakaian.

m) Speakers
Beberapa motherboard memiliki chip suara namun chip ini tidak dapat memperdengarkan suara lain kecuali suara system. Contoh suara ini adalah saat timbul error. Untuk dapat mendengarkan musik favorit anda memerlukan speaker eksternal yang banyak tersedia di pasaran dengan variasi harga yang sangat beragam.

Demikian Tutorial seri 1 dan pastikan anda mengikuti lanjutan tutorial in
l) Keyboard and Mouse
Komponen ini berfungsi memberikan perintah kepada komputer untuk melakukan proses yang kita inginkan. Ada dua jenis keyboard yakni menggunakan kabel atau tanpa kabel (wireless). Disarankan untuk membeli Keyboard kabel Multimedia dan setidaknya mouse optik untuk kenyamanan pemakaian.
m) Speakers
Beberapa motherboard memiliki chip suara namun chip ini tidak dapat memperdengarkan suara lain kecuali suara system. Contoh suara ini adalah saat timbul error. Untuk dapat mendengarkan musik favorit anda memerlukan speaker eksternal yang banyak tersedia di pasaran dengan variasi harga yang sangat beragam.
Demikian Tutorial seri 1 dan pastikan anda mengikuti lanjutan tutorial in









{kind=link}